In this section, we combine the ideas of the inexact Cayley
transformation,
the (Jacobi) Davidson method, and the rational Krylov method.
Roughly speaking, we still have the same method as the inexact Cayley
transform Arnoldi method or the preconditioned Lanczos method, with the
only
difference that
the zero ![]() and the pole
and the pole ![]() may be updated on each iteration.
As with the preconditioned Lanczos method,
the Ritz vectors are computed from the Hessenberg matrices.
In addition, the Ritz values are also computed from the recurrence
relation.
may be updated on each iteration.
As with the preconditioned Lanczos method,
the Ritz vectors are computed from the Hessenberg matrices.
In addition, the Ritz values are also computed from the recurrence
relation.
We now discuss the method in detail, using the algorithm of the rational Krylov method, designed for the inexact Cayley transforms, given below.
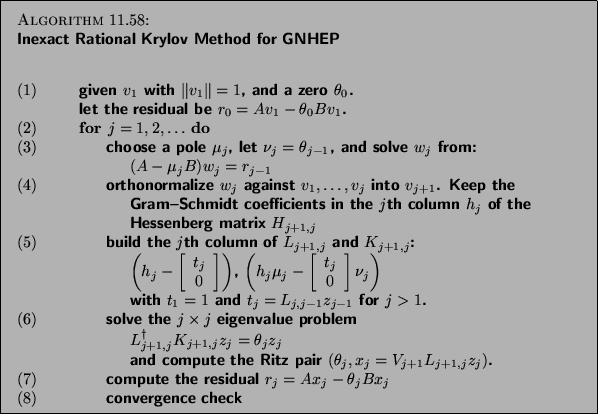
Let us analyze this algorithm step by step.
The solution of the linear system leads to the relations
(11.2) where ![]() is a Ritz vector
and
is a Ritz vector
and ![]() is the associated Ritz value
is the associated Ritz value ![]() from the
previous
iteration, such that
the right-hand side is the residual
from the
previous
iteration, such that
the right-hand side is the residual
![]() .
Since
.
Since
![]() , we can also write
, we can also write
![]() , where
, where
![]() is called the continuation vector.
After the Gram-Schmidt orthogonalization, we have
is called the continuation vector.
After the Gram-Schmidt orthogonalization, we have
![]() , so we can rewrite (11.2) as
, so we can rewrite (11.2) as
Before we continue, we must give some properties of the exact rational
Krylov method.
The following lemma explains how to compute Ritz values in the rational
Krylov method.

As with the (Jacobi) Davidson method, the RKS method applies an inexact
Cayley transform to a vector.
The difference lies in the way the Ritz pairs are computed.
In the (Jacobi) Davidson method, the Ritz pairs result from a Galerkin
projection of
![]() on the subspace.
In the RKS method, the Ritz pairs are computed from the recurrence
relation
using Lemma 11.1, assuming that
on the subspace.
In the RKS method, the Ritz pairs are computed from the recurrence
relation
using Lemma 11.1, assuming that ![]() .
.
With the inexact Cayley transform,
the transformation can be a large perturbation of the exact Cayley
transform,
but can still be used to compute one eigenpair, when ![]() is
well chosen.
The same is true here.
The inexact rational Krylov method delivers an
is
well chosen.
The same is true here.
The inexact rational Krylov method delivers an ![]() (or
(or ![]() ) that is
not
random but small in the direction of the desired eigenpair, as long as the
various parameters are properly set.
) that is
not
random but small in the direction of the desired eigenpair, as long as the
various parameters are properly set.
A Ritz pair ![]() computed by Algorithm 11.4 produces residual
computed by Algorithm 11.4 produces residual