If we can factor
![]() for a shift
for a shift
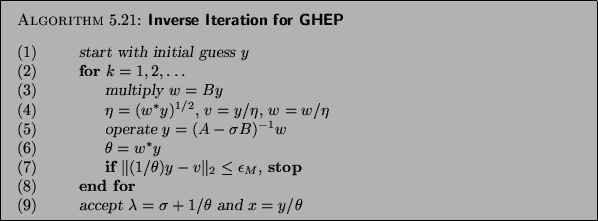
![]() , we can generalize the inverse iteration to
compute eigenvalues of the problem (5.1) near
, we can generalize the inverse iteration to
compute eigenvalues of the problem (5.1) near
![]() as shown in Algorithm 5.2.
as shown in Algorithm 5.2.
Here are some comments on this algorithm.
In step (3) we multiply by ![]() , while in step (5) we solve
a system with the shifted matrix
, while in step (5) we solve
a system with the shifted matrix ![]() . In a practical case, we perform
an initial sparse Gaussian elimination and use
its
. In a practical case, we perform
an initial sparse Gaussian elimination and use
its ![]() and
and ![]() factors while operating.
Step (4) makes sure that the vector
factors while operating.
Step (4) makes sure that the vector ![]() is of unit
is of unit
![]() norm. The quantity
norm. The quantity ![]() is a
Rayleigh quotient,
is a
Rayleigh quotient,