We continue to use the example introduced in
§2.1 and
Figure 2.1.
We again consider the case with arbitrary masses ![]() ,
and zero damping constants
,
and zero damping constants ![]() . This simplifies the equations
of motion to
. This simplifies the equations
of motion to
![]() .
As in §2.3.8 we solve the equations of motion
by substituting
.
As in §2.3.8 we solve the equations of motion
by substituting
![]() , where
, where ![]() is a constant vector
and
is a constant vector
and ![]() is a constant scalar to be determined. This leads
to
is a constant scalar to be determined. This leads
to
![]() . Letting
. Letting ![]() , where
the Cholesky factor
, where
the Cholesky factor
![]() ,
we see that we need to compute the eigenvalues of the symmetric tridiagonal
matrix
,
we see that we need to compute the eigenvalues of the symmetric tridiagonal
matrix
![]() shown in equation (2.2).
shown in equation (2.2).
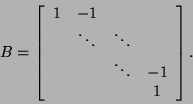
Now we note that the stiffness matrix ![]() can be factored as
can be factored as ![]() ,
where
,
where
![]() and
and

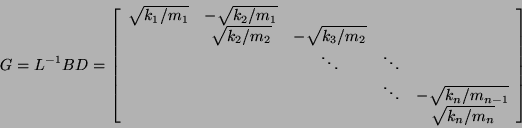
Bidiagonal matrices have particularly fast and efficient SVD algorithms.